
Meine Cousine Conny hat die Arbeit mit Epoxidharz für sich entdeckt und gießt mittlerweile sehr aktiv. Darunter wirklich einige Schmuckstücke von denen ich immer wieder aufs Neue begeistert bin. Dafür braucht man natürlich diverse Silikonformen, um das Epoxidharz hinein zu gießen und aushärten zu lassen. Je nach Künstlerintension werden womöglich auch verschiedene Gegenstände, wie z.B. Zahnräder, Blumen, Muscheln, Sand oder auch Festival Armbänder eingegossen.
Während einer eigentlich gewöhnlichen Unterhaltung, welche Projekte aktuell bei ihr anstehen, hört ich von einem Problem. Sie hatte eine Form für eine Kugel, die später von unten beleuchtet wird. Soweit so gut. Allerdings passiert es, dass während dem Aushärten des Harzes sich teilweise Gegenstände so weit absenken, dass diese bis an die Silikonform ragen. Das Endergebnis sind dann unschöne Verformungen in der Außenhaut der Kugel.
Idee
Als ich an unseren Besuch in der Schokoladenfabrik dachte, fielen mir da sofort diese Rotationsmaschinen ein, die die Formen so lange drehen, bis die Schokolade vollständig ausgehärtet ist und am Ende eine hohle Form entsteht. Da dachten wir beide uns, dass das eigentlich die optimale Lösung auch für dieses Problem sein könnte.
Erster Prototyp
Ich habe mir dazu Gedanken gemacht, wie so eine Maschine für die Form aussehen müsste und ob alles so realisierbar wäre. Nach vielen Stunden voll von Überlegungen zur Machbarkeit, den benötigten Komponenten und der Ausführung entschloss ich mich, dem Projekt anzunehmen. Also begann ich mit der Konstruktion eines Prototypen in FreeCAD. Teil für Teil zeichnete ich also die benötigten Komponenten für die Maschine. In meinem Elektronik-Lager konnte ich fast alle benötigten elektrischen Bauteile finden. Einzig die Schrittmotoren musste ich bestellen. Für den Anfang entschied ich mich hierbei für ganz einfache 28BYJ48 Schrittmotoren. Daraus entstand folgender Prototyp

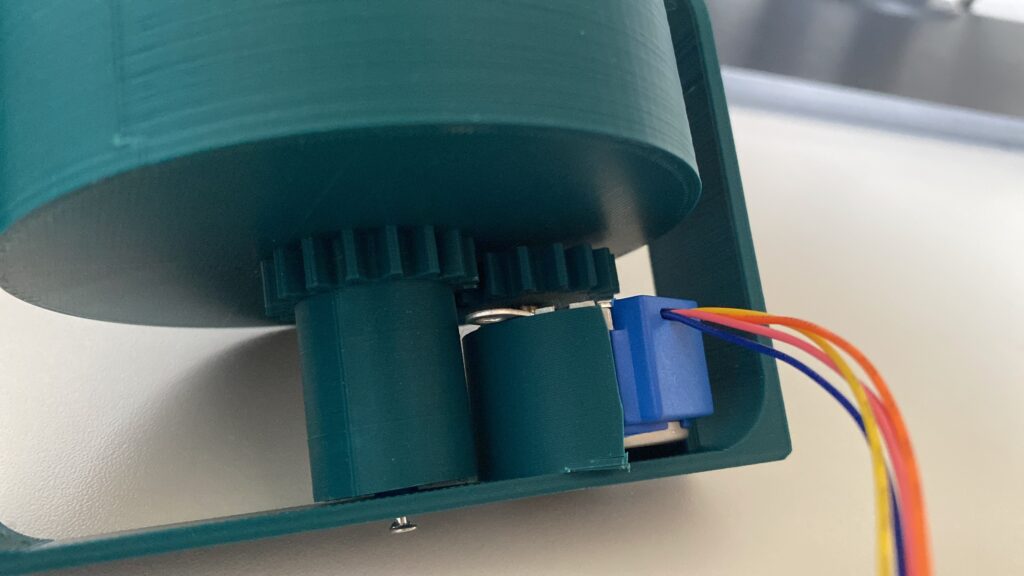
Ergebnis
Ich gab Conny den Prototypen zum Test für eine Machbarkeitsstudie. Diese lief sehr erfolgreich, bis auf den Wermutstropfen, dass die Motoren zu schwach waren und daher die Rotation teilweise ins Stocken geriet. Doch das war nicht weiter tragisch, denn es war ja nur ein Versuch, ob das Ganze überhaupt klappen könnte und Conny daraus einen Nutzen ziehen kann. Der Prototyp erfüllte die Anforderungen vollkommen. Also machte ich mich an die Beschaffung größerer und somit stärkerer Schrittmotoren und zeichnete ein neues stabiles Modell. Nach vielen vielen Stunden Arbeit für Planung, Konstruktion, Programmierung und Bau (vermutlich so ca. 50 h) entstand das erste Serienprodukt der Conny Rotations Maschine.

Funktion
Die Funktion der Conny Rotations Maschine ist relativ simpel. Über eine Web-App können alle wichtigen Parameter eingestellt werden. Das sind zum Beispiel die Winkel, zwischen denen die Maschine auf der X-Achse neigen soll und die Drehgeschwindigkeit für die Z-Achse. Zusätzlich ist in der Maschine zur Kühlung der Schrittmotortreiber ein Lüfter verbaut. Zur Visualisierung des momentanen Betriebszustandes befindet sich noch eine LED am Gehäuse. Um die Funktionen kurz etwas zu erläutern und gleichzeitig als eine Art Handbuch zu dokumentieren, liste ich diese hier auf.
Inbetriebnahme
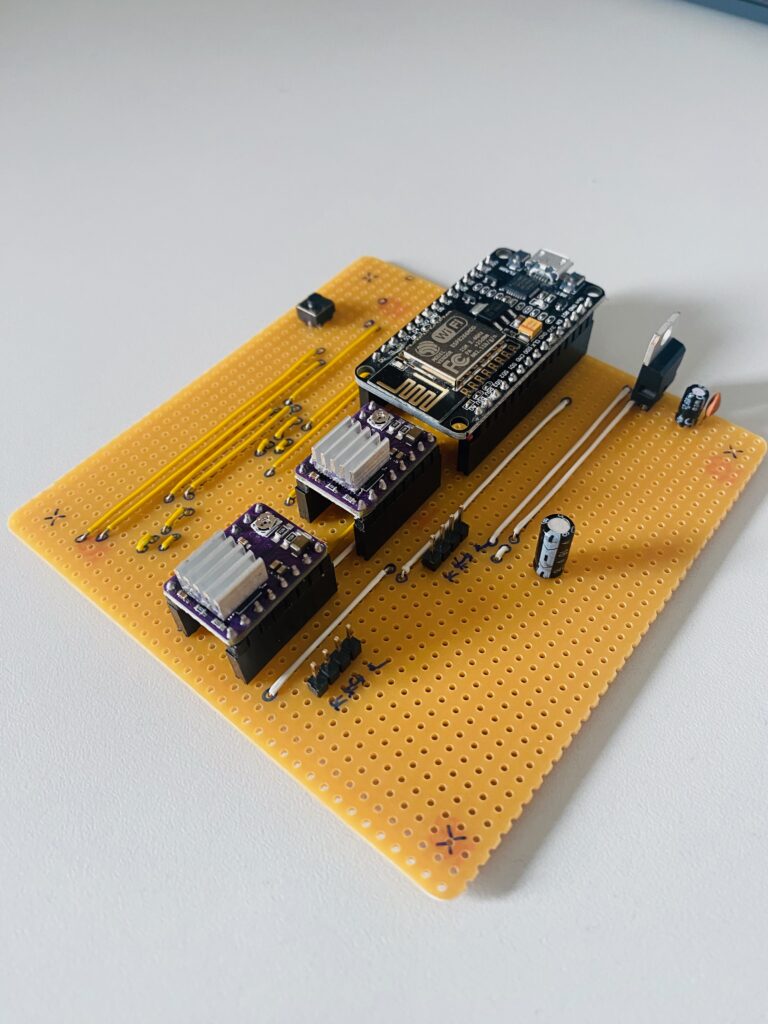
Das fest angeschlossene Steckernetzteil (12 VDC; 1 A) versorgt die Maschine mit Spannung. Der Micro-USB Anschluss auf der linken Seite dient lediglich für das Debugging und ggf. für Updates. Ein Endanwender wird diesen also niemals benötigen. Im Inneren ist eine Platine mit einem Node MCU verbaut. Die eben erwähnte USB-Buchse ist auch genau der Anschluss des Mikrocontrollers.
Beim ersten Start der Conny Rotations Maschine startet diese im AccessPoint Modus. D.h. sie stellt ein unverschlüsseltes WLAN mit dem Namen CRM zur Verfügung. Für Konfiguration muss nun ein WLAN-fähiges Gerät (z.B. Smartphone, Tablet oder Laptop) mit diesem Netzwerk verbunden werden.
Anschließend geschieht die weitere Konfiguration über den Browser. Hierzu muss auf den integrierten Webserver unter der URL http://192.168.4.1/ zugegriffen werden. Es erscheint folgendes Webinterface
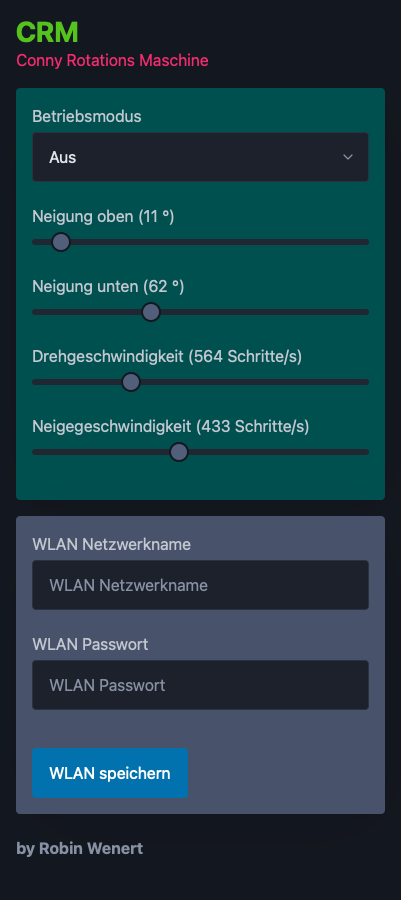
Nun könnte man das System direkt nutzen. Da einige Smartphones jedoch Probleme beim Routing bekommen, wenn Sie mit einem WLAN ohne Internetverbindung (wie in diesem Fall) verbunden sind, empfiehlt es sich, die Maschine in das hauseigene WLAN zu integrieren. Dieser Schritt muss auch nur einmal erfolgen. Die notwendigen WLAN-Paramter werden dann im EEPROM des ESP8266 gespeichert. Um die Integration nun durchzuführen, müssen die Felder unten WLAN Netzwerkname und WLAN Passwort korrekt ausgefüllt werden und anschließend der Button WLAN speichern gedrückt werden. Der Controller wird daraufhin Neustarten und sich mit dem WLAN verbinden. Solange die LED violett leuchtet, wird noch auf Verbindung gewartet. Ist alles korrekt, wird die LED bald erlöschen und alles ist bereit für den ersten Start. Sollte bei der Einrichtung ein Fehler passiert sein, kann die Maschine über den Reset Taster (auf der Unterseite) zurückgesetzt werden. Ist der Reset erfolgreich, leuchtet die LED kurz weiß auf, der Controller startet neu und stellt wieder ein WLAN im AccessPoint-Modus zur Verfügung.
Start
Für den Start empfiehlt es sich, die im Dropdown Betriebsmodus verfügbaren Modi der Reihenfolge nach zu aktivieren. Hierzu folgende Erläuterungen:
- Aus
Die X-Position 0° wird angefahren, anschließend werden die Antriebe deaktiviert und alle Achsen können frei bewegt werden. Nach einem Statuswechsel ist daher eine Referenzierung notwendig, welche aber automatisch durchgeführt wird. - Schritt 1: Neigung oben
Die LED leuchtet dauerhaft orange und die Maschine bewegt sich nur mit der X-Achse auf die Position Neigung oben. Hier kann jederzeit der über den ReglerNeigung obendie gewünschte Endposition für das obere Ende eingestellt werden. Im Normalfall immer 0° - Schritt 2: Drehgeschwindigkeit
Die LED leuchtet gelb und die Z-Achse beginnt zu rotieren. Mit dem SchiebereglerDrehgeschwindigkeitkann nun die gewünschte Geschwindigkeit eingestellt werden. - Schritt 3: Neigung unten
Die LED leuchtet grün, die Z-Achse rotiert weiterhin und die X-Achse neigt auf die Endposition, wie mit demSchieberegler Neigungunten definiert. Über den erwähnten Schieberegler kann nun die untere Endposition festgelegt und ggf. die Geschwindigkeit nochmal angepasst werden. - Automatik
Die LED leuchtet blau mit einem Herzschlag-Effekt. Die Z-Achse rotiert mit der eingestellten Geschwindigkeit und die X-Achse neigt ständig zwischen den beiden Endposition in der gewünschten Geschwindigkeit (anpassbar mit dem SchiebereglerNeigegeschwindigkeit) hin und her. Auch hier können jederzeit noch Änderung an allen Schiebereglern vorgenommen werden.
Ausschalten
Um die Maschine auszuschalten, muss lediglich der Modus auf Aus gestellt werden und anschließend das Steckernetzeil vom Netz getrennt werden.
![]()